

流体力学基础:从本构方程到NS方程
开个坑,因为感觉这一条线的推导是流体力学中很基础的理论线,所以想自己走一遍
抄书:周光坰《流体力学》
组成:应变率张量与应力张量
对于研究的目标流体,有流速场$\vec V(\vec x)$,下面我们在直角坐标系下研究,设流速的x、y、z分量分别为$u(x,y,z),v(x,y,z),w(x,y,z)$
分别对这三个方向上的速度值求梯度,可以得到这样的张量(矩阵形式)
\[\frac{\partial v^i}{\partial x^j} =\begin{pmatrix} \frac{\partial u}{\partial x}&\frac{\partial u}{\partial y}&\frac{\partial u}{\partial z}\\ \frac{\partial v}{\partial x}&\frac{\partial v}{\partial y}&\frac{\partial v}{\partial z}\\ \frac{\partial w}{\partial x}&\frac{\partial w}{\partial y}&\frac{\partial w}{\partial z} \end{pmatrix}\]注意到这个矩阵满足的性质:左作用在位移dx上得到dv
\[\begin{pmatrix} du\\ dv\\ dw \end{pmatrix}=\begin{pmatrix} \frac{\partial u}{\partial x}&\frac{\partial u}{\partial y}&\frac{\partial u}{\partial z}\\ \frac{\partial v}{\partial x}&\frac{\partial v}{\partial y}&\frac{\partial v}{\partial z}\\ \frac{\partial w}{\partial x}&\frac{\partial w}{\partial y}&\frac{\partial w}{\partial z} \end{pmatrix}\begin{pmatrix} dx\\ dy\\ dz \end{pmatrix}\]
现在将这个矩阵分解为对称部分S和反对称部分
\[\begin{pmatrix} \frac{\partial u}{\partial x}&\frac{\partial u}{\partial y}&\frac{\partial u}{\partial z}\\ \frac{\partial v}{\partial x}&\frac{\partial v}{\partial y}&\frac{\partial v}{\partial z}\\ \frac{\partial w}{\partial x}&\frac{\partial w}{\partial y}&\frac{\partial w}{\partial z} \end{pmatrix}=S+A\] \[S=\begin{pmatrix} \frac{\partial u}{\partial x}&\frac{1}{2}(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})&\frac{1}{2}(\frac{\partial u}{\partial z}+\frac{\partial w}{\partial x})\\ \frac{1}{2}(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})&\frac{\partial v}{\partial y}&\frac{1}{2}(\frac{\partial v}{\partial z}+\frac{\partial w}{\partial y})\\ \frac{1}{2}(\frac{\partial u}{\partial z}+\frac{\partial w}{\partial x})&\frac{1}{2}(\frac{\partial v}{\partial z}+\frac{\partial w}{\partial y})&\frac{\partial w}{\partial z} \end{pmatrix}\] \[A=\begin{pmatrix} 0&\frac{1}{2}(\frac{\partial u}{\partial y}-\frac{\partial v}{\partial x})&\frac{1}{2}(\frac{\partial u}{\partial z}-\frac{\partial w}{\partial x})\\ \frac{1}{2}(\frac{\partial v}{\partial x}-\frac{\partial u}{\partial y})&0&\frac{1}{2}(\frac{\partial v}{\partial z}-\frac{\partial w}{\partial y})\\ \frac{1}{2}(\frac{\partial w}{\partial x}-\frac{\partial u}{\partial z})&\frac{1}{2}(\frac{\partial w}{\partial y}-\frac{\partial v}{\partial z})&0 \end{pmatrix}\]S被称作应变率张量;A中的三个分量恰为1/2倍的旋度,Adx=Ωdx=w x dx,这一部分是绕瞬时轴转动时的速度
在下面的推导中,主要关注对称(无旋)速度场梯度S
作用在流体上的力分为表面力与场力,后者按密度均匀分配(比如重力),比较好理解,主要还是看表面力(也叫应力)
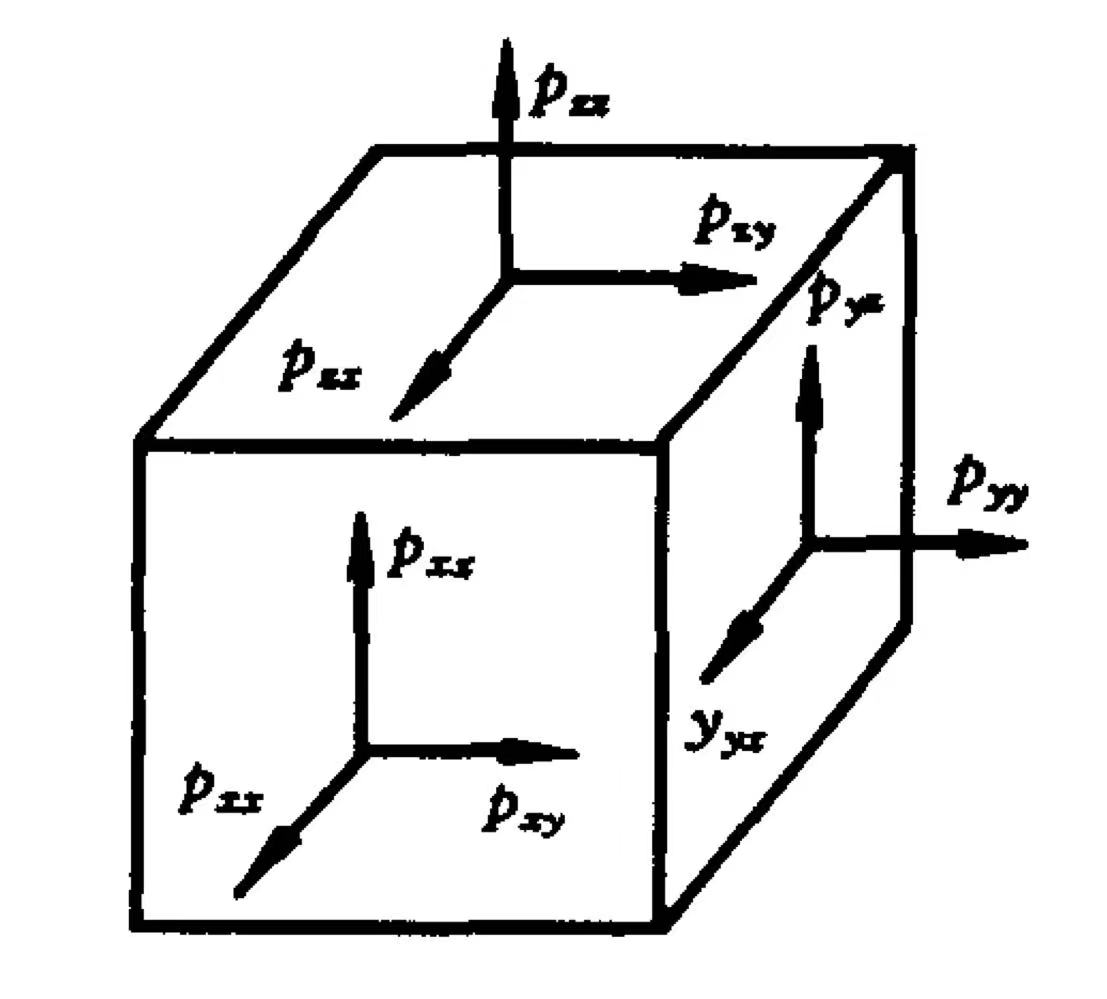
在体积微元dxdydz上,一共有三个面的力,每个面受力又分三个方向,所以总共就是3x3的矩阵来描述
\[P=\begin{pmatrix} p_{xx}&p_{xy}&p_{xz}\\ p_{yx}&p_{yy}&p_{yz}\\ p_{zx}&p_{zz}&p_{zz}\\ \end{pmatrix}\]其中,pij代表i面上受到的j方向上的力;已知面的法向单位向量n求受力,就直接$\vec n^TP$即可
定理:应力张量P是对称的
证明:(关键在于观察无穷小的阶数)由于考虑的体积元很小,质量是三阶无穷小量,Δp是一阶小量,S是二阶小量,所以合外力ΔF是3阶小量,与质量同阶,可以存在;但是合力矩是三阶小量,转动惯量是五阶小量,所以在微元上必须有合力矩为0
能产生合力矩的只有交叉项,而力矩共线(能互相抵消)的只有对称项,例如$p_{xy}$、$p_{yx}$,他们产生的力矩正好共线反向,所以全部交叉对称项必然相等,也即P是对称的
对于理想的无粘性流体,P退化为压强标量
牛顿定律->本构方程
这一节书上的推导不是很令人满意的,遂查阅资料后写了一份适合自己思路的推导;只能保证结果是对的,如果你觉得我这个不合你胃口建议去看书
牛顿所得到的实验定律:流体间的切应力与速度梯度成正比,因子为粘度系数
\[\tau = \mu\frac{\partial u}{\partial y}\]这个式子反映了应力P交叉项与流速梯度交叉项之间的关系
(P是对称的,所以在等式中只能先将速度梯度的反对称部分A不研究)为了半推半猜出张量P与张量S之间的关系,需要如下三个假设
1中其实包含了个前提假设,我在这里说清楚了:P由各向同性部分(I的倍数,无论如何转动都保持不变)与方向性部分组成,其中方向性部分被称作偏应力张量T
1.偏应力张量T与S成线性齐次关系(T=标量·S)
2.流体各向同性
3.静止流体(S=0)应力P退化到静压强
将1的前提假设与假设3联系起来,可以看出各向同性部分分为与S无关的静压力部分$p_0I$和动态部分$d(S)I$,则暂时可以将P写作
\[P=p_0I+d(S)I+T\]使用假设1;注意到P的1,2项为$p_{xy}$;S的1,2项为$\frac{1}{2}(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})$,结合牛顿实验定律与假设2来推广,可得
\[T=2\mu S\]实际上我觉得$p_{xy}$与$\frac{\partial v}{\partial x}$有关,$p_{yx}$与$\frac{\partial u}{\partial y}$有关,但是由于先前的微元不受合力矩导致交叉项全部混为一谈了
为了求出d(S),仅需观察等式左右对角线上分量性质,所以求个迹(还有个原因,标量b是基无关的,求迹的好处是脱离基相关性)
\[p_{xx}+p_{yy}+p_{zz}=3p_0+3d(S)+2\mu\nabla\cdot\vec v\]d(S)一定是关于S的基变换不变量,现在只可能和两种相关:{detS,trS},考虑detS,若xyz中任意方向流速均匀,则detS=0,无法反映速度相关性质,所以仅取trS,也即divv,设
\[d(S)=\lambda\nabla·\vec v\]其中,$\lambda$被称为体膨胀粘度系数,也被称为第二粘度系数;他反应了流体实际压强与流体的膨胀或压缩有关的性质。
这一段也是靠猜的
在最后的表达式中,为了与流行的写法一致,将静压强取一个负号,令p=-p0,最后得出本构方程,P关于S的表达式
\[P=2\mu S+(-p+\lambda\nabla·\vec v)I\]也即表面力对速度梯度的影响
雷诺输运定理
这个方程是下面两个方程(质量守恒+动量定律)的抽象化表述
设单位体积上有某一物理量$f(\vec x,t)$(可以是标量如ρ,也可以是矢量如ρv),此物理量的区域内积分为$I(t)=\iiint_Vf(\vec x,t)$
则区域积分I的变化率为区域积分的变化+流入的通量
\[\frac{D}{Dt}I(t)=\iiint_V \frac{\partial}{\partial t}f(\vec x,t)+\oint_{\partial V}f\vec v\cdot\vec{dS}\]因为这看着足够有感觉了所以证明从略
质量守恒+动量定律
质量守恒:(密度的变化率=流入的密度通量)这种东西在物理里经常玩所以就懒得写具体推导了
\[\frac{\partial\rho}{\partial t}=-\nabla\cdot(\rho\vec v)\]这个式子还可以继续改写,把右边的散度打开
\[\frac{\partial\rho}{\partial t}=-\rho\nabla\cdot \vec v-\vec v\cdot\nabla\rho\] \[\frac{\partial\rho}{\partial t}+\vec v\cdot\nabla\rho=-\rho\nabla\cdot\vec v\] \[\frac{D\rho}{Dt}=-\rho\nabla\cdot\vec v\]动量定律:(动量的变化率=合力)
微控制体中动量的变化量来自于两个方面:1.内部动量变化2.动量流出
内部动量变化为
\[\frac{\partial(\rho \vec v)}{\partial t}\]动量流出为(使用求和约定)
\[\frac{\partial}{\partial x^i}(\rho v^i\vec v)=(\rho \vec v\otimes\vec v)\vec \nabla=(v\cdot\nabla)\rho\vec v+\rho(\nabla·\vec v)\vec v\]故总动量变化率为
\[\frac{\partial(\rho \vec v)}{\partial t}+(v\cdot\nabla)\rho\vec v+\rho(\nabla·\vec v)\vec v=\frac{D}{Dt}(\rho\vec v)+\rho(\nabla·\vec v)\vec v\\ =\frac{D\rho}{Dt}\vec v+\frac{D\vec v}{Dt}\rho+\rho(\nabla·\vec v)\vec v=\vec v(\frac{D\rho}{Dt}+\rho(\nabla·\vec v))+\frac{D\vec v}{Dt}\rho\]由质量守恒,括号内的表达式为0,故总动量变化率可以化简为
\[\frac{D\vec v}{Dt}\rho\]下面计算作用在微元上的质量力和表面力
质量力
\[\rho \vec F_b\]表面力合力(力的梯度造成了力之差)$\vec p_i$表示在i面上所受力矢量,使用求和约定
\[\frac{\partial}{\partial x^i}\vec p^i\]根据动量定理,有
\[\frac{D\vec v}{Dt}\rho=\rho \vec F_b+\frac{\partial}{\partial x^i}\vec p^i\]注意到$\frac{\partial}{\partial x^i}\vec p^i$恰为应变张量P与矢量nabla的内积,故上式写作
\[\rho\frac{D\vec v}{Dt}=\rho \vec F_b+\vec\nabla·P\]N-S方程
将
\[P=2\mu S+(-p+\lambda\nabla·\vec v)I\]左右做散度
\[\vec\nabla·P=2\vec\nabla·(\mu S)-\nabla p+\nabla (\lambda\nabla·\vec v)\]代入
\[\rho\frac{D\vec v}{Dt}=\rho \vec F_b+\vec\nabla·P\]可得
\[\rho\frac{D\vec v}{Dt}=\rho \vec F_b+2\vec\nabla·(\mu S)-\nabla p+\nabla (\lambda\nabla·\vec v)\]当流体的体积压缩膨胀效应较小时,将三方向法相压强平均值视作始终=静压强,此时可以通过这个等式消去第二粘度系数,仅留一个粘度系数μ
\[\lambda=-\frac{2\mu}{3}\] \[\rho\frac{D\vec v}{Dt}=\rho \vec F_b+2\vec\nabla·(\mu S)-\nabla p-\frac{2}{3}\nabla (\mu\nabla·\vec v)\]上式被称为Navier-Stokes方程
更特殊地,在第一粘度系数处处相等的不可压流体中,有
\[\rho\frac{D\vec v}{Dt}=\rho \vec F_b+2\mu\vec\nabla·S-\nabla p\]因为下面的计算要用,所以先将$\nabla·\vec v=0$这个式子打开
\[\frac{\partial u}{\partial x}+\frac{\partial v}{\partial y}+\frac{\partial w}{\partial z}=0\]以第一个坐标x为例,两侧对x求偏导并移项,可得
\[\frac{\partial^2v}{\partial x\partial y}+\frac{\partial^2 w}{\partial x\partial z}=-\frac{\partial^2 u}{\partial x^2}~~(*)\]计算$\vec\nabla·S$
\[\vec\nabla·S=\begin{pmatrix} \frac{\partial}{\partial x}&\frac{\partial}{\partial y}&\frac{\partial}{\partial z} \end{pmatrix} \begin{pmatrix} \frac{\partial u}{\partial x}&\frac{1}{2}(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})&\frac{1}{2}(\frac{\partial u}{\partial z}+\frac{\partial w}{\partial x})\\ \frac{1}{2}(\frac{\partial u}{\partial y}+\frac{\partial v}{\partial x})&\frac{\partial v}{\partial y}&\frac{1}{2}(\frac{\partial v}{\partial z}+\frac{\partial w}{\partial y})\\ \frac{1}{2}(\frac{\partial u}{\partial z}+\frac{\partial w}{\partial x})&\frac{1}{2}(\frac{\partial v}{\partial z}+\frac{\partial w}{\partial y})&\frac{\partial w}{\partial z}\end{pmatrix}\]以第一个坐标为例,
\[(\vec\nabla·S)_x=\frac{\partial^2 u}{\partial x^2}+\frac{1}{2}(\frac{\partial^2 u}{\partial y^2}+\frac{\partial^2 v}{\partial x\partial y})+\frac{1}{2}(\frac{\partial^2 w}{\partial x\partial z}+\frac{\partial^2 u}{\partial z^2})\]将(*)式代入上式,可得
\[(\vec\nabla·S)_x=\frac{1}{2}(\frac{\partial^2 u}{\partial x^2}+\frac{\partial^2 u}{\partial y^2}+\frac{\partial^2 u}{\partial z^2})=\frac{1}{2}\nabla^2u\]其他分量同理,故
\[\vec\nabla·S=\frac{1}{2}\nabla^2\vec v\]代回特殊条件下的NS方程,可得
\[\rho\frac{D\vec v}{Dt}=\rho \vec F_b+\mu\nabla^2\vec v-\nabla p\]进一步简化:无粘流体
\[\rho\frac{D\vec v}{Dt}=\rho \vec F_b-\nabla p\]再进一步简化:静止流体
\[\rho \vec F_b=\nabla p\]算是写完了,感受是:书上一笔带过的我硬写,书上详细证明的我懒得读
原创文章转载请注明出处: 流体力学一